
Examples¶
Specifying parameters by arguments¶
In addition to the input file, all listed parameters can be specified/overridden via arguments to the function:
from golfball.sim import Sim
gb_sim = Sim()
gb_sim.run()
print(gb_sim.qoi)
produces:
{'max_height': 50.08844542014751, 'max_range': 185.2417438617364, 'time_of_flight': 6.28}
so Sim.qoi is a dictionary with the Quantities of Interest (QoI), or outputs from the sim.
Similarly, you can also see what inputs were used by querying the attribute “inputs”. Below we do this using the “PrettyPrint” module to make the dictionary more readable:
import pprint
pp = pprint.PrettyPrinter(indent=2)
pp.pprint(gb_sim.inputs)
which produces:
{ 'config': { 'out_filename': 'projectile_outputs.yml',
'traj_filename': 'projectile_trajectory.h5',
'write_traj': False},
'params': { 'D': 0.04222,
'eD': 0.0125,
'g_LL': [0.0, 0.0, -9.81],
'm': 0.0459,
'rho_scale': 1.0,
'wind': [0.0, 0.0, 0.0]},
'state': {'angle': 38.0, 'pos_LL': [0.0, 0.0, 0.0], 'vel_mag': 70.0},
'time': {'dt': 0.01, 't_init': 0.0, 't_stop': 20.0}}
All parameters and the initial state (but not the QoIs, those are outputs!)
listed in the output above can specified via an argument list to
golfball.sim.main(). This is usually done to tweak something quickly
or for automated testing purposes.
NOTE: Best practice is to edit and use input files so the user has a re-run-able single source for a run.
The sim also runs at the command line:
$ gball --verbose --angle 23.0 --vel_mag 75.0
Config Parameters
----------------
-- out_filename : projectile_outputs.yml
-- traj_filename : projectile_trajectory.h5
-- write_traj : False
Time Parameters
----------------
-- dt : 0.01
-- t_init : 0.0
-- t_stop : 20.0
Input Parameters
----------------
-- D : 0.04222
-- eD : 0.0125
-- g_LL : [0.0, 0.0, -9.81]
-- m : 0.0459
-- rho_scale : 1.0
-- wind : [0.0, 0.0, 0.0]
Initial State
----------------
-- angle : 23.0
-- pos_LL : [0.0, 0.0, 0.0]
-- vel_mag : 75.0
Quantities of Interest (QoI):
-----------------------------
-- Distance Travelled: 171.951781 m
-- Max Height: 25.312299 m
-- time @ impact: 4.430000 s
or without the verbose output:
$ gball --angle 23.0 --vel_mag 75.0
Saving full trajectory data¶
If the user wants to save the detailed output from the ODE solver of the trajectory, they can do so by specifying the “write_traj” boolean option. The user can also specify a filename for the trajectory using the “–traj_filename” option.
gb_sim.write_trajectories('ang24_traj.h5')
or equivalently at the command line:
$ gball --write_traj --traj_filename ang24_traj.h5 --angle 24 --verbose
produces the following output:
Config Parameters
----------------
-- out_filename : projectile_outputs.yml
-- traj_filename : ang24_traj.h5
-- write_traj : True
Time Parameters
----------------
-- dt : 0.01
-- t_init : 0.0
-- t_stop : 20.0
Input Parameters
----------------
-- D : 0.04222
-- eD : 0.0125
-- g_LL : [0.0, 0.0, -9.81]
-- m : 0.0459
-- rho_scale : 1.0
-- wind : [0.0, 0.0, 0.0]
Initial State
----------------
-- angle : 24.0
-- pos_LL : [0.0, 0.0, 0.0]
-- vel_mag : 70.0
Quantities of Interest (QoI):
-----------------------------
-- Distance Travelled: 164.399779 m
-- Max Height: 24.850240 m
-- time @ impact: 4.400000 s
This saves the output to an HDF5 file for re-loading using the python utility provided:
from golfball.sim import load_gball_h5
traj_df = load_gball_h5('ang24_traj.h5')
traj_df
p_LL_x p_LL_y p_LL_z v_LL_x v_LL_y v_LL_z
time
0.00 0.000000 0.0 0.000000 63.948182 0.0 28.471565
0.01 0.637998 0.0 0.283565 63.651957 0.0 28.241804
0.02 1.273050 0.0 0.564842 63.358889 0.0 28.013898
0.03 1.905186 0.0 0.843849 63.068926 0.0 27.787817
0.04 2.534438 0.0 1.120605 62.782016 0.0 27.563529
... ... ... ... ... ... ...
4.36 163.379549 0.0 0.843387 25.577324 0.0 -19.655098
4.37 163.635142 0.0 0.646483 25.541460 0.0 -19.725570
4.38 163.890378 0.0 0.448876 25.505572 0.0 -19.795884
4.39 164.145254 0.0 0.250566 25.469659 0.0 -19.866042
4.40 164.399771 0.0 0.051556 25.433721 0.0 -19.936041
[441 rows x 6 columns]
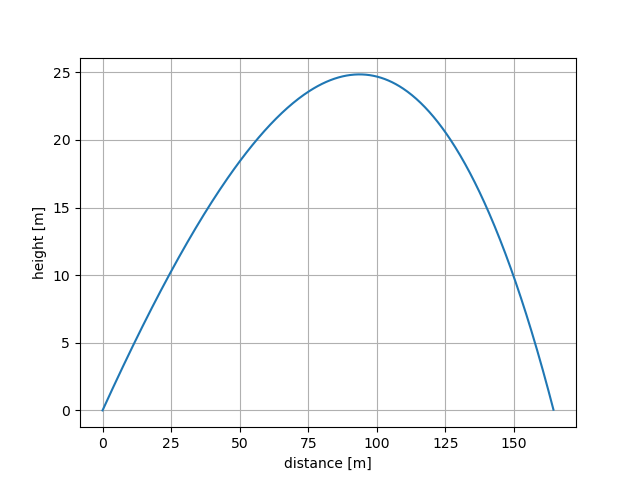
Which when plotted:
import matplotlib.pyplot as plt
fig, ax = plt.subplots()
ax.plot(np.linalg.norm(traj_df[['p_LL_x','p_LL_y']],axis=1),
traj_df['p_LL_z'])
ax.grid(True)
ax.set_xlabel('distance [m]')
ax.set_ylabel('height [m]')
fig.savefig('trajectory.png')
produces:
Any other user loading this h5 file should realize that the data is internally stored to be loaded by the python pandas package into a DataFrame object. The HDF5 file has a ‘/traj_df’ group where that data resides. The formatting of that group is dictated by how Pandas likes to save its DataFrames in the default “fixed” format.
Using golfball with Dakota¶
This simulation was written to work at the command line with text-editable YAML input files, which can be used with Dakota via the “fork” interface. For example a shell script ‘golfball.sh’ can use the command line tools installed with this module:
#!/bin/sh
# Projectile Sim Wrapper for dakota
# See the "Building a black box interface to Simulation Code" (section 10.3) and
# also the "Advanced Simulation Code Interfaces" (chapter 16) in the Dakota
# Users' Manual
# This sript is called as the analysis_driver in dakota.in and is executed per
# sample run by Dakota when it runs an individual job.
#
# It expects two inputs:
# $1 is specified parameters_file in dakota.in
# $2 is specified results_file in dakota.in
# --------------
# PRE-PROCESSING
# --------------
# Incorporate the parameters from DAKOTA (parameters.in) into the template
# (projectile_template.yml) to produce the simulation input
# (projectile_inputs.yml)
dprepro $1 projectile_template.yml projectile_inputs.yml
# --------
# ANALYSIS
# --------
# Run simulation
gball -i projectile_inputs.yml -o projectile_outputs.yml
# ---------------
# POST-PROCESSING
# ---------------
# Process simulation outputs (projectile_outputs.yml) into the format expected
# by Dakota (results.out)
yaml2results projectile_outputs.yml $2
to work in conjunction with the following interface block of a dakota.in file:
interface
fork
analysis_drivers = 'golfball.sh'
parameters_file = 'dakota_params.in'
results_file = 'dakota_results.out'
work_directory directory_tag
copy_files = 'template_files/*'
named 'run/sample' file_save directory_save
See the examples in the test/uq_dakota for two examples of how dakota uses this simulation.